Approximate calculations of local displacement fields can be based on analyzing the optical flow, which is defined by the changes in image irradiances from image Ei to image Ei+1 of an image sequence. The optical flow can be analyzed for arbitrary image sequences. The optical flow is also, for example, of interest for calculating motion estimations in the area of active vision, or animate vision.
Optical flow is defined by the changes in image irradiances from image Ei to image Ei+1 of an image sequence. The optical flow describes the direction and the speed of the object in the image.In general we consider the optical flow highly correlated to the local displacement but in reality it cannot be identified with it. For example consider a sphere showing no surface texture that is rotating in front of a camera. No optical flow can be observed even though a motion of object points occurs, i.e. the motions of surfaces showing no surface texture. On the other hand, for a static sphere and changing lighting conditions an optical flow can be observed for the sphere surface although no motion of surface points takes place. The optical flow can also depend on instability of the camera sensor, on changing illumination, or on different surface appearance for different viewing directions. Thus it is clear from the beginning the optical flow only allows to approximate local displacement fields in some cases. Ideally the optical flow is identically to the local displacement field.
The basic Horn-Schunck methods uses this assumptions.
Implementation (of the basic Horn-Schunck Algorithm)
We have implemented our program to be run in a batch environment, so without interaction with the user. All parameters are given through the commandline:HWindowwhich means that we could use its methods to draw circles and lines. To be able to draw the flow representation even for points at the border of the window, we defined an offset and factor which specify some extra space. An enlargement factor was introduce to make the lines more visible. As the window handling with Halcon is not that fast, we had to add a pause before being able to write to the canvas. Otherwise there would be some points in the upper left part missing.begin
for j=: 1 to N do for i=:1 to M do begin:
calculate the values Ex(i, j, t), Ey(i,j,t), and Et(i, j, t);
{special cases for image points at the image border have to be taken into account}
initialize the values u(i, j) and v(v, j) with zero
end {for};
choose a suitable weighting value lambda {e.g. lambda=0.1)
choose a suitable number n0>=1 of iterations; {n0=8}
n:=1;
while n<=n0 do begin
for j:= 1 to N do for i:=1 to M do begin
udash=(u(i-1,j) +u(i+1, j) + u(i, j-a) +u(i, j+1))/4;
vdash=(v(i-1,j) +v(i+1, j) + v(i, j-a) +v(i, j+1))/4;
{leave image points at the image border unconsidered}
alpha=Ex(i,j,t)*udash+Ey(i,j,t)*vdash +Et(i, j, t)*lambda/(1+lambda(Ex(i, j, t)^2 +Ey(i, j, t)^2);
u(i, j)=udash -alpha* Ex(i,j,t);
v(i, j)=vdash-alpha*Ey(i, j, t)
end{for};
n=n+1;
end{while}
end;The local differences are computed with a simple and an advanced one. The first one simply computes the difference between the current and next pixel value E(i,j) - E(i,j+1). The advanced one is the method used by Horn-Schunk. For each run we calcullate and store the least square error of u and v for the iteration step. Thus we can see how fast they converge against zero with the given parameter. This is one of the criterias we used for our evaluation.
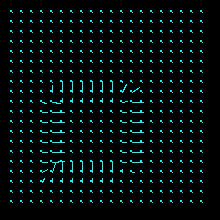
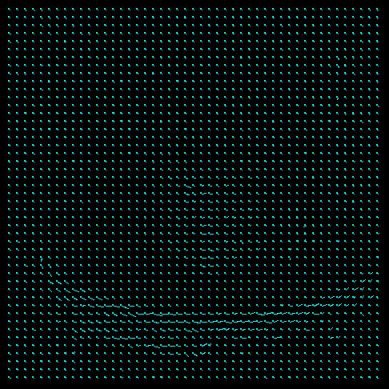
Representation
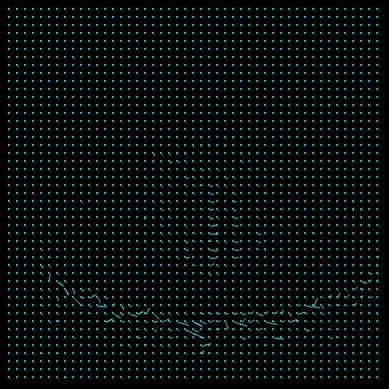
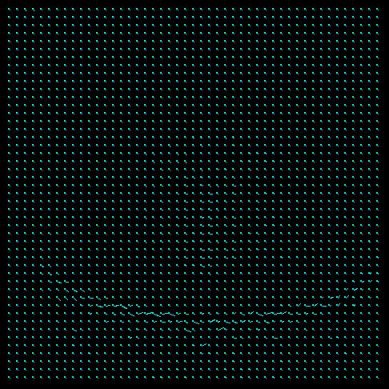
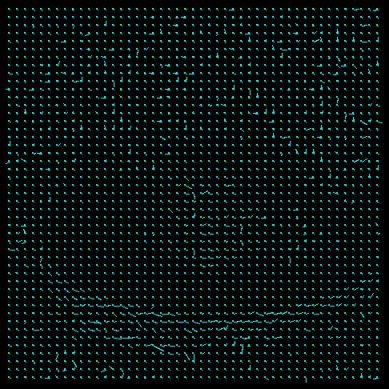
A needle map is used to represent the Results. Not every point is drawn with its correspondent representation of the displacement (basically a line), but only some of them. Those are regularly chosen from the original dataset by applying a grid an the image. The grid width once was 10 points but was refined to 5 because with just a few data samples the flow in the Results is not clearly visible (loss of information). From testing it has shown that too many needles in the image only confuse and hide information. For getting clearer representation we deciced to enlarge the needles by a factor of 3.
We could't present the whole range of possible Results on the original due date and thus no findings about Horn-Schunck because we were constantly handicapped by the computer system of the University. We refuse any responsibility for that and the inability to hand-in materials and draw our conclusions in time.Camparison of methods for local differences with different Results
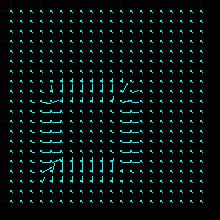
iterations=8 lambda=0.1 u(i,j)=v(i,j)=0
simple forward advanced forward sqare
LSE_u: 0.0011307 LSE_v: 0.0013669
LSE_u: 0.0017220 LSE_v: 0.0016719mysine
LSE_u: 0.0001125 LSE_v: 0.0000332
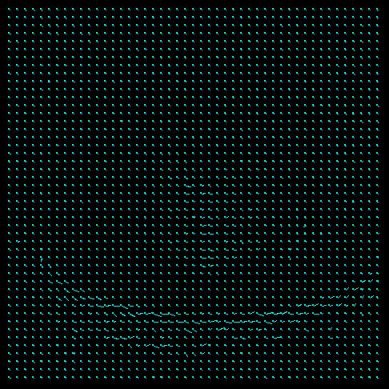
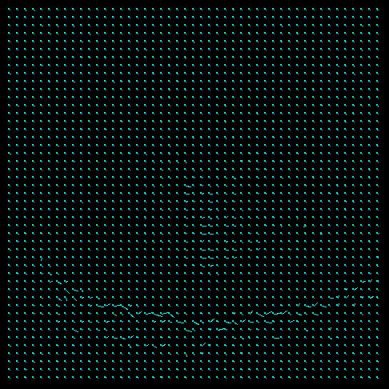
LSE_u: 0.0000908 LSE_v: 0.0000408rubic LSE_u: 0.0003402 LSE_v: 0.0001016 LSE_u: 0.0000844 LSE_v: 0.0000827 trees LSE_u: 0.0002889 LSE_v: 0.0008819 LSE_u: 0.0006038 LSE_v: 0.0005663 It can be easily observed that the Horn-Schunk method computes the flow more acurately. The needle map is clearer and has less errors and noise on it, but this depends on the image. Looking at the least square error (LSE) reveals an arbitrary image: sometimes the LSE correspond with the visuable Results (advanced forward method should have a less LSE after the iterations than the simple forward method), sometimes not.
The Horn-Schunk needs more compution time (if this is relevant) but anyhow we chose it as the appropiate method for all further tests. From the observation of this experiment we chose the rubic?.jpg as Results for the further tests, because it seems to have a good noise-data relation which Results in a clear Horn-Schunk representation. Some other parameter seem not to be chosen that well (enlargement factor), because there are artefacts and obviously errors in the needle map (to long lines...).Camparison of different lambda values
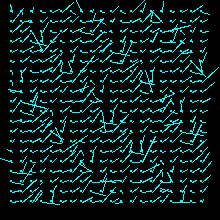
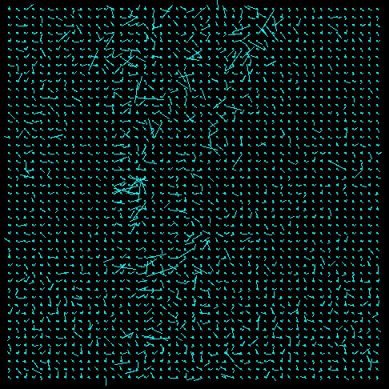
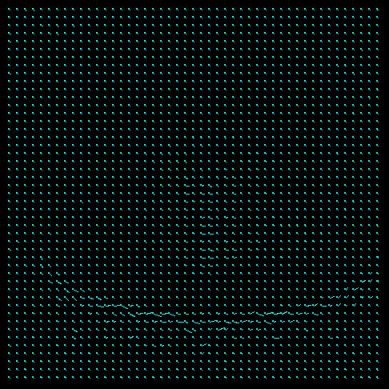
iterations=8 u(i,j)=v(i,j)=0
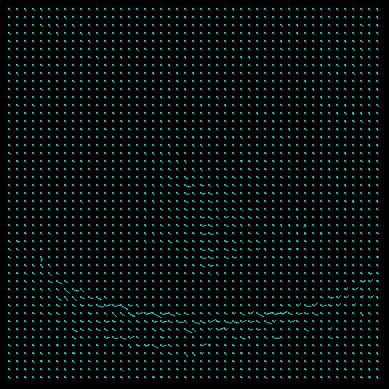
lambda=0.001 LSE_u: 0.0000638 LSE_v: 0.0000101 lambda=0.01 LSE_u: 0.0000653 LSE_v: 0.0000164 lambda=0.1 LSE_u: 0.0000908 LSE_v: 0.0000408 lambda=1.0 LSE_u: 0.0001273 LSE_v: 0.0000978 lambda=10 LSE_u: 0.0001377 LSE_v: 0.0001055 lambda=100 LSE_u: 0.0001391 LSE_v: 0.0001062 With this Results we can see that for high values of lambda the Results become noisy but the Horn-Schunk effect a little clearer. But this effect get vanished in the noise. So we decided to take a good noise/Horn-Schunk effect relation which seem to be given with lambda=0.1. The next step (lambda=1.0) includes noticable noise but in the image before (lambda=0.01) the Horn-Schunck effect is too subtle. The comparison of the LSE in the different runs shows that the higher the lambda the less is the LSE converging against zero. So a relatively small lambda is more effective. Thus we used lamda=0.1 as default in the whole test.
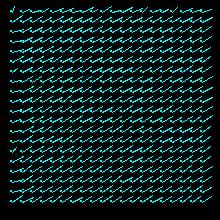
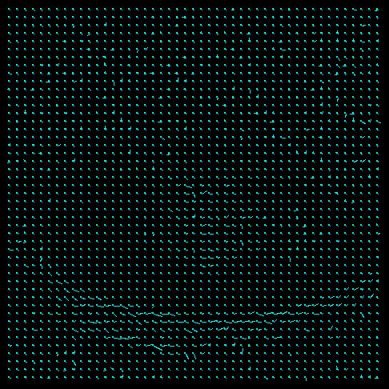
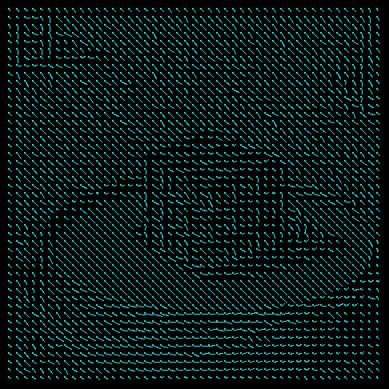
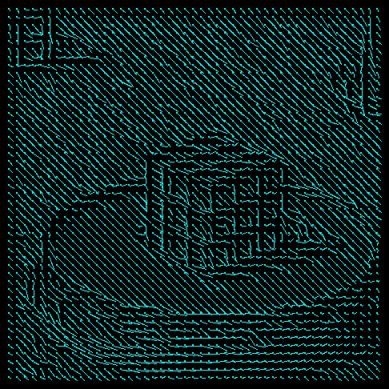
Camparison of different iteration steps
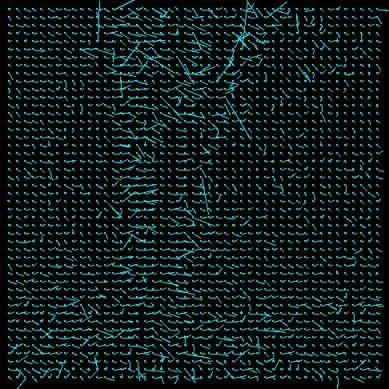
lambda=0.1 u(i,j)=v(i,j)=0
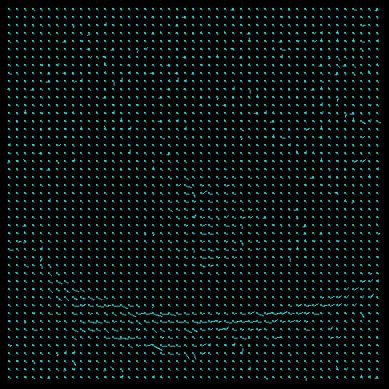
iterations=1 LSE_u: 0.0229580 LSE_v: 0.0079244 iterations=2 LSE_u: 0.0017817 LSE_v: 0.0009416 iterations=5 LSE_u: 0.0002067 LSE_v: 0.0000927 iterations=8 LSE_u: 0.0000908 LSE_v: 0.0000408 iterations=10 LSE_u: 0.0000612 LSE_v: 0.0000280 iterations=20 LSE_u: 0.0000168 LSE_v: 0.0000084 With more iterations the Horn-Schunck effect gets clearer and more accurate. A comparison between the first and the last Results definetly shows that (and the comparison of the LSE proves it). Concerning the computation time, the more iterations the more time is spend and the more memory allocated. Surprisingly the case with ten iterations shows heavy noise in some part. We think that with eight iterations the Results is sufficiently clear and thus used this value as default for all tests.
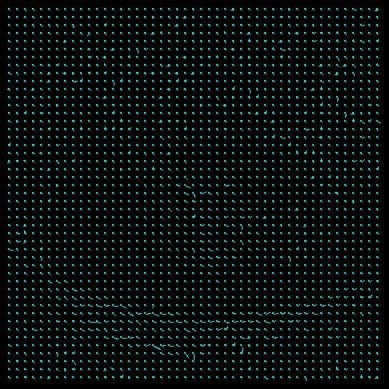
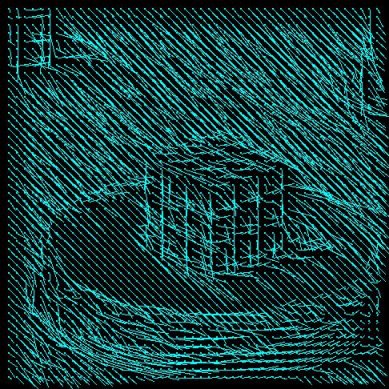
Camparison of different initial values for u and v
iterations=8 lambda=0.1
u(i,j)=v(i,j)=0 u(i,j)=v(i,j)=1 u(i,j)=v(i,j)=2 u(i,j)=v(i,j)=5 u(i,j)=v(i,j)=10 The initial value of u and v influence the algorithm in the wat that they predetermine of certain direction of the flow tensors (represented as strokes). In our experiment we can observe that a from different u,v there are largely different outputs. Some might be interesting from the view point of an artist, but for the exact representation of the Horn-Schunck solution they seem not suitable. That mostly because the artist like style of the output is noise (artificially inserted) in the image processing sense.

This assignment almost exclusively considers motions of scene object as causes of scene changes.Optical flow is defined by the changes in image irradiances from image Ei to Ei+1 of an image sequence. We use Horn-Schunck method in this assignment. All image points is treated equally, independent from the (unknown) distance of the projected object surface points to the image plane.We would appreciate if the computer system in the university was permanently working and not be in a constant 'pre-release' phase!
Source for the Horn-Schunck operator


